导语
最近团队进行了一些线程的讨论,这里抽空水了一篇关于线程的文章,希望给没接触过线程相关知识的同学入个门。
线程是什么
进程
既然要说线程,那就不得不提它的两个好兄弟,进程、协程。
进程大家应该是最了解的,平时用的 ps 命令就是查看计算机中的进程情况,进程的特点:
1、独立,资源(内存)隔离,互不干扰
2、拥有自己的生命周期和状态
让人又爱又恨的 chrome,每个 tab 在默认情况下是单独的进程,流畅是真的,内存大户也是真的。
线程
结合进程的特点,可以显而易见发现进程的劣势在于资源的同步,因为互相隔离,无法共享内存,那样一些数据共享的场景,就需要借助比如管道、Signal、Socket 等手段来完成,增加了成本。
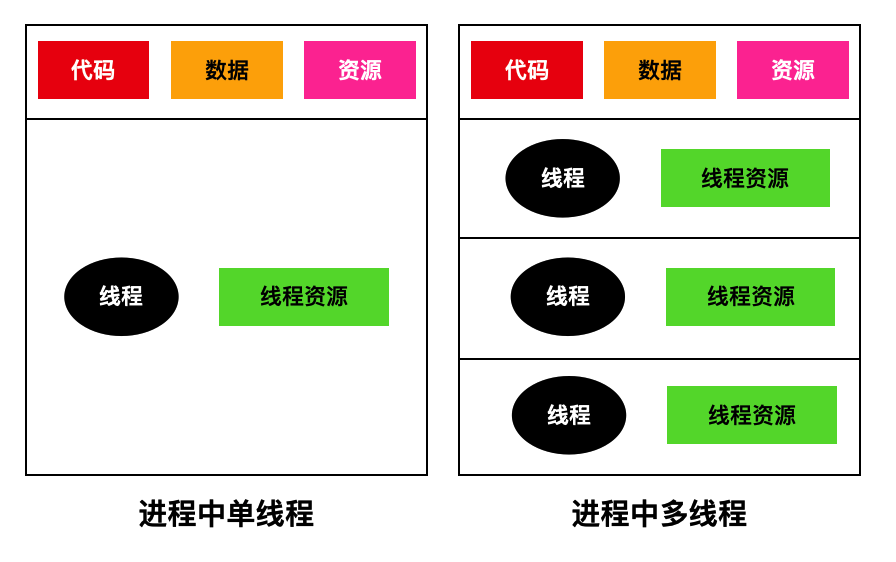
线程就可以解决上述场景,线程是进程的组成部分,它拥有的资源都是来自于进程,也就意味着同一个进程下的不同线程,资源是共享的。
进程中单线程和多线程的区别
协程
线程虽然解决了资源的问题,但是它和进程在底层上都是交给操作系统去管理,cpu 不仅仅要关注进程上下文的切换,也需要考虑线程之间的切换,每一次切换都是性能的开销。
一个优秀的程序员可以不脱发,但是不能不追求性能,所以协程应运而生。协程的特点就是它是应用层面的,不再交由操作系统去切换处理,由开发者自己控制,减少上下文切换开销。
go 中的 goroutine 就算是一种特殊的协程,大概代码如下
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 |
// ...package import func fibonacci(i int64, endChan chan<- bool) { result := calc(i) fmt.Printf("Result: %d \n", result) endChan <- true } func calc(i int64) int64 { if i < 3 { return 1 } return (calc(i-1) + calc(i-2)) } func main() { endChan := make(chan bool) for i := 0; i < 5; i++ { go fibonacci(int64(i*10), endChan) } for i := 0; i < 5; i++ { <-endChan } fmt.Printf("Thread End") } |
感兴趣的可以自行了解
多线程编程
Hello World
上面从刚刚介绍了进程、线程、协程的区别,下面就开始真正的线程介绍。Talk is cheap. Show me the code。
我们用斐波拉切数列为例,使用 C++ 和 Javascript 展示一下多线程计算。
C++
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 |
// 一般在 linux 使用上都是使用 posix 库,需要带上 lpthread int calc(int i) { if (i < 3) { return 1; } return calc(i-1) + calc(i-2); } int fibonacci(int i) { int result = calc(i); printf("Result: %d \n", result); return result; } int main() { vector<thread> vec; for (int i = 0; i < 5; i++) { thread t(fibonacci, i * 10); vec.push_back(std::move(t)); } for (auto& t : vec) { t.join(); } printf("Thread End"); return 0; } |
Javascript
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 |
// main.js const taskArray = []; for (let i = 0; i < 5; i++) { taskArray.push(new Promise((resolve, reject) => { const worker = new Worker('./thread.js'); worker.onmessage = (e) => { resolve(); worker.terminate(); }; worker.postMessage(i * 10); })); } Promise.all(taskArray).then(() => { console.log('Thread End'); }).catch(() => { console.error('Thread Error'); }); // thread.js function calc(i) { if (i < 3) { return 1; } return calc(i-1) + calc(i-2); } function fibonacci(i) { let result = calc(i.data); console.log("Result: %d", result); return result; } onmessage = function(i) { fibonacci(i); postMessage(true); } |
语法都非常简单,这里就不解释了,不过看完之后可能会有感触:
无论是 go 的协程还是 c++ 的代码都挺好理解的(得益于 c++11 标准化),javascript 看上去反而是最复杂的一个(这看起来都已经是跨进程的体验了),不是说:
「凡是可以用 JavaScript 来写的应用,最终都会用 JavaScriptTypeScript 来写。」
这里是因为 javascript 运行在浏览器内核下,以 chromium 内核为例,它并没有真正的支持上线程的特点:内存共享,所以普通的 js 线程和 worker 线程在通信上就有了一个 message 传输的现象。
这里插个广告,推荐 AlloyWorker,是团队成员 cnt 大佬开发的一个库,可以让你在 js 上更爽的使用 worker 能力。
再来说说为什么 js 被设计成这样(这里指的都是浏览器端运行的 js),因为 js 运行在浏览器端 => js 最根本的指责就是操作 dom,这是不可改变的。
如果有多个线程,有线程要设置 dom 属性,有的要删除 dom,浏览器都裂开了,完全顶不住。数据库的分布式原则也是单个写服务,多读服务,也是避免了写操作冲突的情况。(后面会提到写冲突的一些事情)
但是 worker 不能操作 dom 啊,为什么还要和 js 主线程内存隔离?
目前应该主要还是安全性考虑和 js 语言本身导致的复杂性。目前 ES8 引入的 SharedArrayBuffer 已经用缓冲区的方式实现了真正的内存共享。
多线程的优势
你可以不了解多线程,但是你一定知道多线程的技术是为了性能。针对程序性能,我们先讲解一下关于程序执行的三个 time
go 协程执行斐波拉切数列的耗时

real(Wall Clock Time) 为时钟时间,也就是程序执行的自然时间,这也是我们直接感受到程序的耗时。
user 为用户时间,也就是代码执行的时间。
sys 为内核时间,是内核工作的一些耗时。
也就是我们从执行到看到结果,一共等待了 9s,时间还是挺长的,我们如果用迭代改写,可以看到时间有大幅度的优化
递归改成迭代的耗时

real 的耗时基本上可以理解为 real = user / 执行内核数量 + sys
我们知道单核 cpu 也可以并发执行多个任务,靠的是 cpu 自身频繁的切换调度,并不是真正的并行,所以两个耗时 5s 的任务,在单核下,无论是来回切换执行,还是顺序执行,最终的耗时一定都是 10s。
下面是一个验证,首先是这样的代码
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
// 单线程 void stop() { // 耗时操作 大概 5s int d = 0; for (int n = 0; n < 10000; ++n) { for (int m = 0; m < 100000; ++m) { d += d * n * m; } } } int main() { stop(); stop(); return 0; } |
单线程执行两个耗时 5s 的操作结果

|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 |
// 多线程 void stop() { // 耗时操作 大概 5s int d = 0; for (int n = 0; n < 10000; ++n) { for (int m = 0; m < 100000; ++m) { d += d * n * m; } } } int main() { std::thread t1(stop); std::thread t2(stop); t1.join(); t2.join(); return 0; } |
多线程+限制单核执行

多核情况就不一样了,下面我们放开 cpu 的限制,可以明显看到,real time 直接少了一半,但是 user time 不变。
多线程无限制执行

那么多线程编程是不是在单核架构下就毫无作为了呢?当然不是,顺序执行意味着 cpu 是固定死了,不跑完不罢休。
中途如果有交互、网络请求,统统 hold 住,而很多情况下,用户宁愿卡死,也不希望页面毫无反应。下面的地址是一个🌰:https://vorshen.github.io/blog/thread/js/pending/index.html
如果点击单线程卡住 5s,会发现交互和定时器全部卡死了,新启线程就没有这个问题。
多线程的坑
如上可知多线程好处多多,只是月有阴晴圆缺,多线程坑还是不少的,下面列举几个
数据冲突
我们知道,数据库主从方案中,基本上都是只有一个服务器作为写服务器,其中一个很大的原因就是避免写的冲突
由于多线程的内存区域是共享的,写冲突的情况很容易出现,出现之后会是什么现象呢?我们看下面的代码分析
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
int sum = 0; void add() { for (int i = 0; i < 10000; i++) { sum++; } } int main() { add(); add(); printf("Result: %d \n", sum); return 0; } |
上面的代码,只要有点编程基础的,都知道答案是 20000,这时候我们引入多线程
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 |
int sum = 0; void add() { for (int i = 0; i < 10000; i++) { sum++; } } int main() { std::thread t1(add); std::thread t2(add); t1.join(); t2.join(); printf("Result: %d \n", sum); return 0; } |
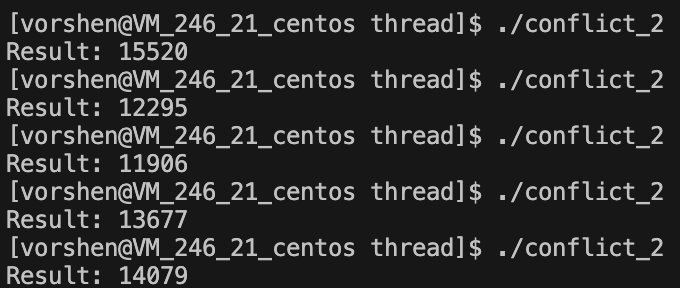
大家可以在心中猜一下答案,下面揭晓执行情况
执行情况 A
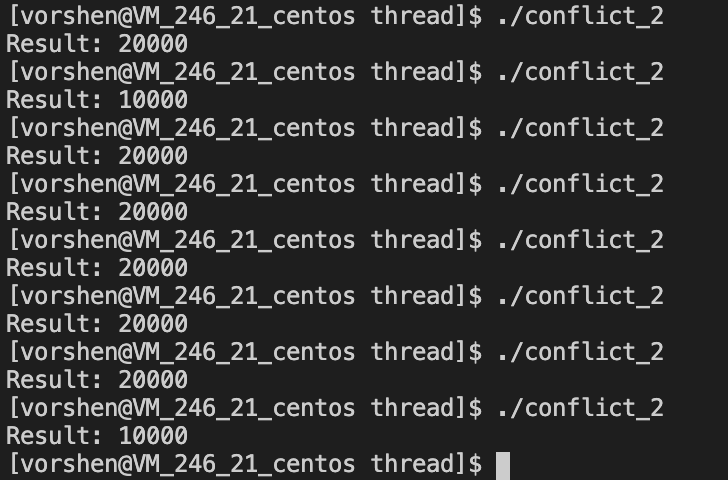
执行情况 B
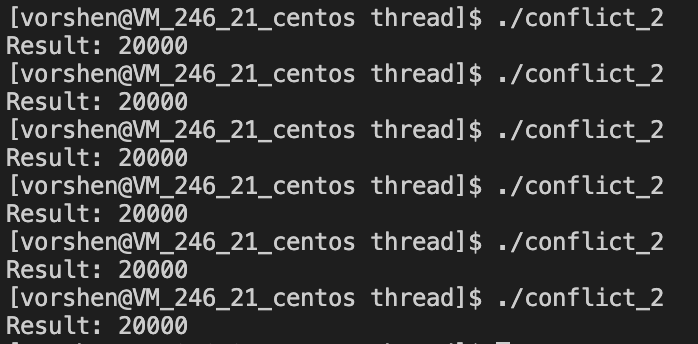
执行情况 C
裂开,怎么同样一份代码有三种情况
A 是每次执行都不一样
B 虽然大部分时候是正常的,但是还是会出现错误答案 10000
C 看起来是对的
原因是因为编译的优化参数不同导致的
我们依次来分析一下
针对 A,汇编的代码是这样 (没有 -O 参数优化)
|
1 2 3 4 5 6 7 8 |
4: c7 45 fc 00 00 00 00 mov DWORD PTR [rbp-0x4],0x0 b: 81 7d fc 0f 27 00 00 cmp DWORD PTR [rbp-0x4],0x270f 12: 7f 15 jg 29 <_Z3addv+0x29> 14: 8b 05 00 00 00 00 mov eax,DWORD PTR [rip+0x0] # 1a <_Z3addv+0x1a> 1a: 83 c0 01 add eax,0x1 1d: 89 05 00 00 00 00 mov DWORD PTR [rip+0x0],eax # 23 <_Z3addv+0x23> 23: 83 45 fc 01 add DWORD PTR [rbp-0x4],0x1 27: eb e2 jmp b <_Z3addv+0xb> |
14 行,这里先将 sum 取了出来赋值给了 eax 寄存器
1a 行,eax 寄存器 + 1
1d 行,将 eax 重新赋值给 sum
大概流程图如下:
不同的顺序会带来不同的结果
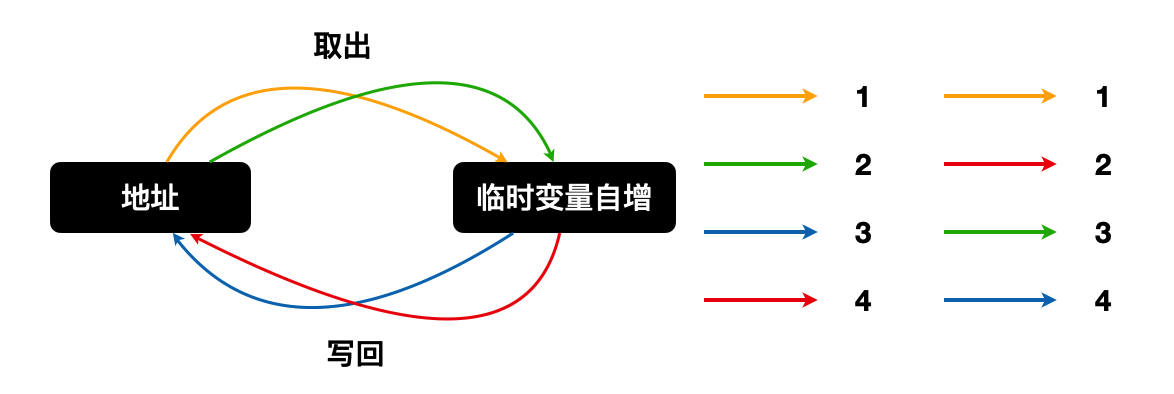
所以当遇到写冲突的时候,就会出现覆盖,然后每次增加之前又取最新的值,所以就会出现执行的现象
针对 B,汇编的代码是这样 (-O1 优化)
|
1 2 3 4 5 6 |
6: b8 10 27 00 00 mov eax,0x2710 b: 83 e8 01 sub eax,0x1 e: 75 fb jne b <_Z3addv+0xb> 10: 8d 82 10 27 00 00 lea eax,[rdx+0x2710] 16: 89 05 00 00 00 00 mov DWORD PTR [rip+0x0],eax # 1c <_Z3addv+0x1c> 1c: c3 ret |
根据之前的分析,也可以理解,为什么会出现 20000,也会出现 10000
针对 C,汇编的代码是这样 (-O2 优化)
|
1 2 3 |
0: 81 05 00 00 00 00 10 add DWORD PTR [rip+0x0],0x2710 # a <_Z3addv+0xa> 7: 27 00 00 a: c3 ret |
可以看到,这里直接用 add 指令替代了 move,没有了「先取出来-> 修改-> 再写回」这个流程,这种情况下,正好避免了写入冲突,所以没问题
一份代码如此的不可信肯定不是开发所希望的,该如何解决这样的数据冲突问题呢?
结合 mysql 写操作冲突的解决方案,可以通过加锁解决,多线程编程中确实有互斥锁的解决方案
先上代码
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 |
int sum = 0; std::mutex mtx; // 声明了一个 mtx 变量来进行锁操作 void add() { // 上锁 mtx.lock(); for (int i = 0; i < 10000; i++) { sum++; } // 解除锁定 mtx.unlock(); } int main() { std::thread t1(add); std::thread t2(add); t1.join(); t2.join(); printf("Result: %d \n", sum); return 0; } |
核心也就是多了 lock() 和 unlock() 这两个操作,也非常好理解。go 中的 sync.Mutex 也是类似的用法。javascript 中,针对 localStorage 的线程安全,也有 mutex 的实现,感兴趣的同学可以了解。
用了锁,就得考虑死锁,死锁的直接原因就是某个线程 lock 之后没有正常的 unlock(比如 throw error 了),这也是没有满足 RAII 机制。
C++ 为此提供了 std::lock_guard 和 std::uniqe_lock 对象可以与 std::mutex 配合使用,用法并不复杂,这里不进行详细展开。
但是加锁的开销是很大的,一些小场景下,希望可以更轻量的解决冲突问题,此时可以使用「原子化 atomic」方案。
C++ 支持了 atomic,不过目前支持的类型还比较少,我们可以试一下
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 |
// atomic int 类型 // atomic(const atomic&) = delete 拷贝构造函数被删除 std::atomic<int> sum{0}; void static add() { for (int i = 0; i < 10000; i++) { sum++; } } int main() { std::thread t1(add); std::thread t2(add); t1.join(); t2.join(); int temp = sum; printf("Result: %d \n", temp); return 0; } |
这里原子化是如何保证不会出现数据冲突就比较复杂了,我们下次再说。
注意,复杂场景下请使用互斥锁的方案,基础数据类型简单场景下,可以使用 atomic 降低开销,不要强求无锁编程。
调试麻烦
一个普通的单线程程序,调试起来无论是流程还是堆栈,看起来都是比较清晰的:
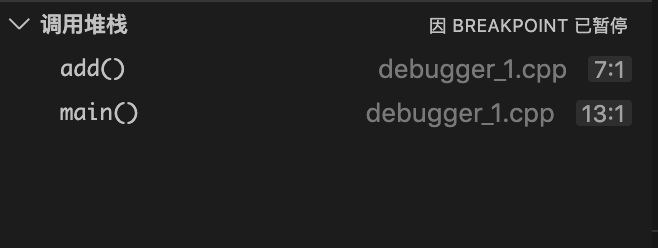
基本上单线程调试的复杂度,是随着代码复杂度,常数级增加(一般不会超过线性级)。
但是涉及到多线程,这里复杂度就会明显上升:
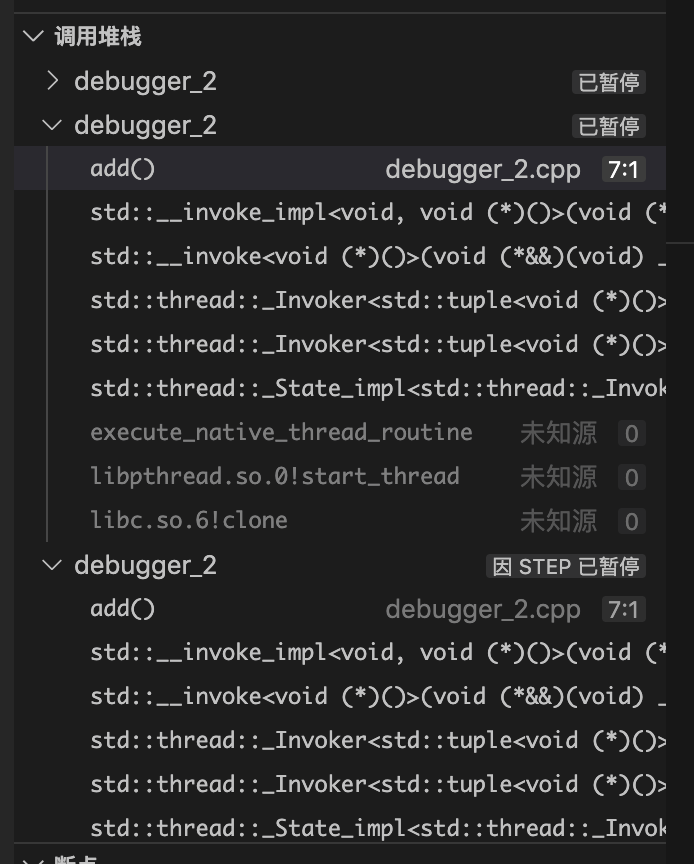
而多线程的调试,随着代码复杂度+线程数目,复杂度很容易变成指数级。
针对这种痛点,多打日志,多打日志,多打日志。
系统调度开销
我们知道 nginx 有一个 worker_process 的参数,可以设置启动的 worker 进程的数量
|
1 |
worker_processes auto; |
当是 auto 的时候,就是有几个 cpu,启动几个 worker 进程
这里启动了两个进程

网上某些经验推荐可以是 cpu 数目*2,为什么不把直接拉满呢,这里就是因为进程数过多,会有很多内核切换的开销。
线程相比较进程,虽然调度开销少了很多,但还是会存在这样的问题,我们可以简单用代码测试一下。
首先是单线程代码:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 |
void stop() { // 耗时操作 大概 0.005s int d = 0; for (int n = 0; n < 1000; ++n) { for (int m = 0; m < 1000; ++m) { d += d * n * m; } } } int main() { for (int i = 0; i < 1000; ++i) { stop(); } return 0; } // result // real 0m5.121s // user 0m5.116s // sys 0m0.001s |
关注这里的 sys 时间,非常的小
如果我们采用多线程的方式执行 stop 函数:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 |
void stop() { // 耗时操作 大概 0.005s int d = 0; for (int n = 0; n < 1000; ++n) { for (int m = 0; m < 1000; ++m) { d += d * n * m; } } } int main() { std::vector<std::thread> vec; for (int i = 0; i < 1000; ++i) { vec.push_back(std::move(std::thread(stop))); } for (auto& t : vec) { t.join(); } return 0; } // result // real 0m2.616s // user 0m5.151s // sys 0m0.057s |
启动了 1000 个线程去计算后,可以看到 sys 的时间明显增加,所以使用多线程也需要心中有数,不要负优化了。
总结
我们简单介绍了下多线程的背景知识,也对多线程编程有了入门的讲解,最后罗列出来了一些多线程存在的注意问题,坑点
后面有时间,会分析一下一些大型项目中多线程的使用~
最后留个多线程的题目,感兴趣的同学可以尝试一下:
https://leetcode-cn.com/problems/the-dining-philosophers/
