或许在生活中大家都讨厌定时器,比如周一早上的闹钟、承诺老板第二天一早给报告的 deadline;但是在代码的世界里,定时器扮演着不可或缺的角色:定时任务、超时判断、帧同步等等。
那定时器的本质是什么?我们使用的定时能力背后又暗藏着什么玄机,请继续往下看。
注意:由于博客系统问题导致排版有点异常,接受不了的可以看 https://github.com/vorshen/blog/blob/master/timer/index.md
目录
定时能力需要什么
信号
POSIX Timer
多路复用
定时能力需要什么
javascript 的定时器能力应该是使用最为方便,默认的上下文捕获,函数式编程。
|
1 2 3 4 5 |
setTimeout(function() { console.log('利利喝多了'); }, 3000); console.log('利利吨吨吨'); |
我们可以把 setTimeout 的执行,拆解一下,主要是以下的流程。
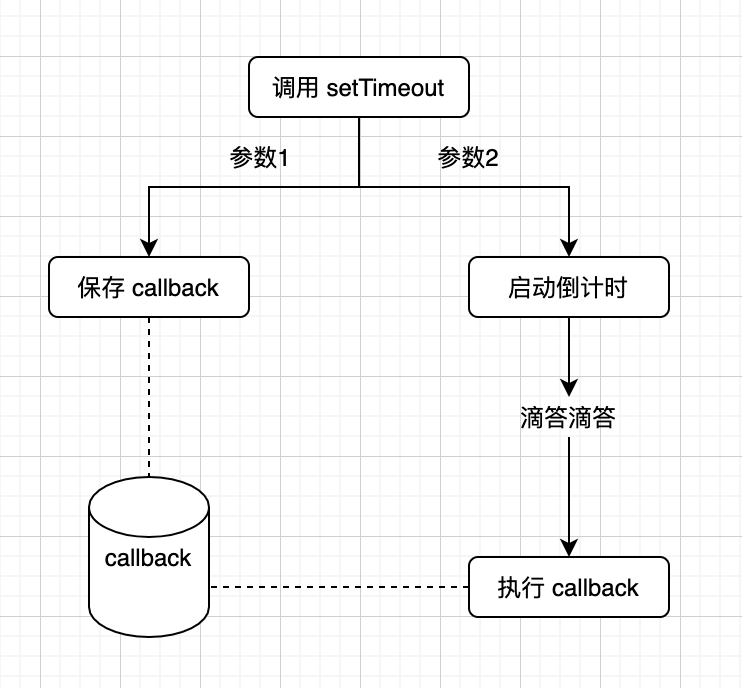
主要有三个环节:
- 存放 callback
- 启动一个倒计时
- 倒计时结束,取出存好的 callback,RUN!
BTW: JS 中定时器这么方便,不仅仅是 v8 的功劳,还需要执行环境 (eg: chrome、node) 给予支持。如果用 d8 去调试,会发现 setTimeout 并没有定时执行。
核心需要解决 1,2 两个问题,先看存放 callback,这里总结一下存放的特点:
- 上层设置定时任务的顺序是不确定的,而最终的执行是有顺序的,这里涉及到排序行为
- 设置定时器的动作可能是多次的
满足由上条件,我们可以使用一个小根堆的数据结构来存放 callback。
BTW: 也有一种时间轮的方案,libco 中采取时间轮方案。
那么该如何启动一个倒计时的钟摆呢?从编程语言层面是没有倒计时相关 api 的,还好操作系统内核给了我们一些解决方案。
BTW: 就好比说到 Linux 上定时任务,大家基本上都会想到 crontab,这也是内核给我们的能力的一种表现。
内核中具体的时钟能力如何实现,不是我们的重点,这会涉及到 CPU 时钟中断,再底层还有硬件相关,感兴趣的同学可以自行查阅。我们重点放在代码中如何去使用操作系统提供的时钟能力。
对于程序来说,我们的诉求就是设定了一个时间,当该时间到达(可以理解为超时),内核可以通知到应用程序。那么有哪些通知方式呢?
信号方案
那么我们先看信号的方案,一说到信号,可能就会想到 alarm(sleep 走开),这里举个简单的🌰。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 |
#include <unistd.h> #include <stdio.h> #include <signal.h> #include <stdlib.h> int curr = 0; int max = 3; void drink() { printf("利利吨吨吨\n"); curr++; if (curr < max) { alarm(1); // 1s 后发出 SIGALRM 信号 } else { kill(getpid(), SIGINT); } } void sigalrmCallback(int sig) { drink(); } void sigintCallback(int sig) { printf("利利喝不动了\n"); exit(0); } int main(int argc, char* argv[]) { signal(SIGALRM, sigalrmCallback); // 时钟定时信号 signal(SIGINT, sigintCallback); // 终止信号 drink(); while (1) { pause(); // 等待信号 } return 0; } |
结果就不截图了,代码比较好理解,核心就是围绕 SIGALRM 的监听和触发。
不过这里有一些问题,我们一一来看下
Q1: 精度问题,秒为精度,这太草了,肯定不能接受
A1: 不过我们可以用其他函数代替,比如 setitimer (精度为毫秒)
Q2: 无法多次调用 alrm
A2: 我们需要包装一层,处理多次调用的情况。
不过上面两个个问题还算好解决,针对以上两个问题解法,这里有个改为 setitimer 优化版本,可见这里。
结果如下图
可以看到精度提高了,并且支持了多次调用。
但是别高兴的太早!问题还没有结束!
Q3: 多线程情况下怎么办?
A3: 信号在多线程下就是不灵活,一般做法需要用单独的线程去监听信号,其他线程屏蔽,写起来很麻烦。
Q4: 信号可靠性?无论是 alrm 还是 setitimer 都是发送非实时信号。
A4: ???这太致命了,虽然是概率性的,但是总有在机场等艘船的感觉。
总结一下: 使用信号整体问题较多,虽然我们尝试了一些解决方案,但是还是会存在无解的问题,所以这里也没有真实使用信号的例子。
POSIX
针对刚刚的 Q1 到 Q4,根本性在于 alrm 和 setitmer 都不够完善,为此 POSIX Timer 相关函数提供了解决方案。这一小节,我们主要看一下 POSIX Timer 相关函数,都是如何解决刚刚那些问题的。
-
精度问题
POSIX Timer 支持程度更高,支持到纳秒级别。 -
无法多次调用
一个进程可以多次创建 Timer,相互独立。1234567891011121314151617181920212223242526272829303132333435363738394041424344#include <unistd.h>#include <stdio.h>#include <signal.h>#include <stdlib.h>#include <pthread.h>decltype(SIGRTMIN) SIG_DRINK = SIGRTMIN + 1;void drink(u_int32_t second) {struct sigevent evp;timer_t timer;evp.sigev_notify = SIGEV_SIGNAL;evp.sigev_value.sival_ptr = &timer;evp.sigev_signo = SIG_DRINK; // 自定义信号int ret = timer_create(CLOCK_REALTIME, &evp, &timer); // 创建定时器if (ret) {printf("timer_create error\n");}struct itimerspec ts;ts.it_value.tv_sec = second / 1000;ts.it_value.tv_nsec = (second % 1000) * 1000;ts.it_interval.tv_sec = 0;ts.it_interval.tv_nsec = 0;ret = timer_settime(timer, CLOCK_REALTIME, &ts, nullptr); // 设置定时器if (ret) {printf("timer_settime error\n");}}int main(int argc, char* argv[]) {signal(SIG_DRINK, [](int sig) {printf("利利吨吨吨\n");});drink(3000);drink(2000);drink(1000);while (1) {pause();}return 0;}可以看到这里并不需要自己去处理多次调用,直接走创建定时器,设置定时器的流程就行。
-
多线程
POSIX Timer 提供了默认能力,当定时器结束的时候,可以启动线程执行对应的函数。而且在 Linux 下,还扩展提供了往指定线程发送信号的能力。 -
信号可靠性
POSIX Timer 也可以指定信号,不过不再局限于非实时信号,可以选择实时信号,🛫️。
针对 POSIX Timer 的调用,下面画了一张图
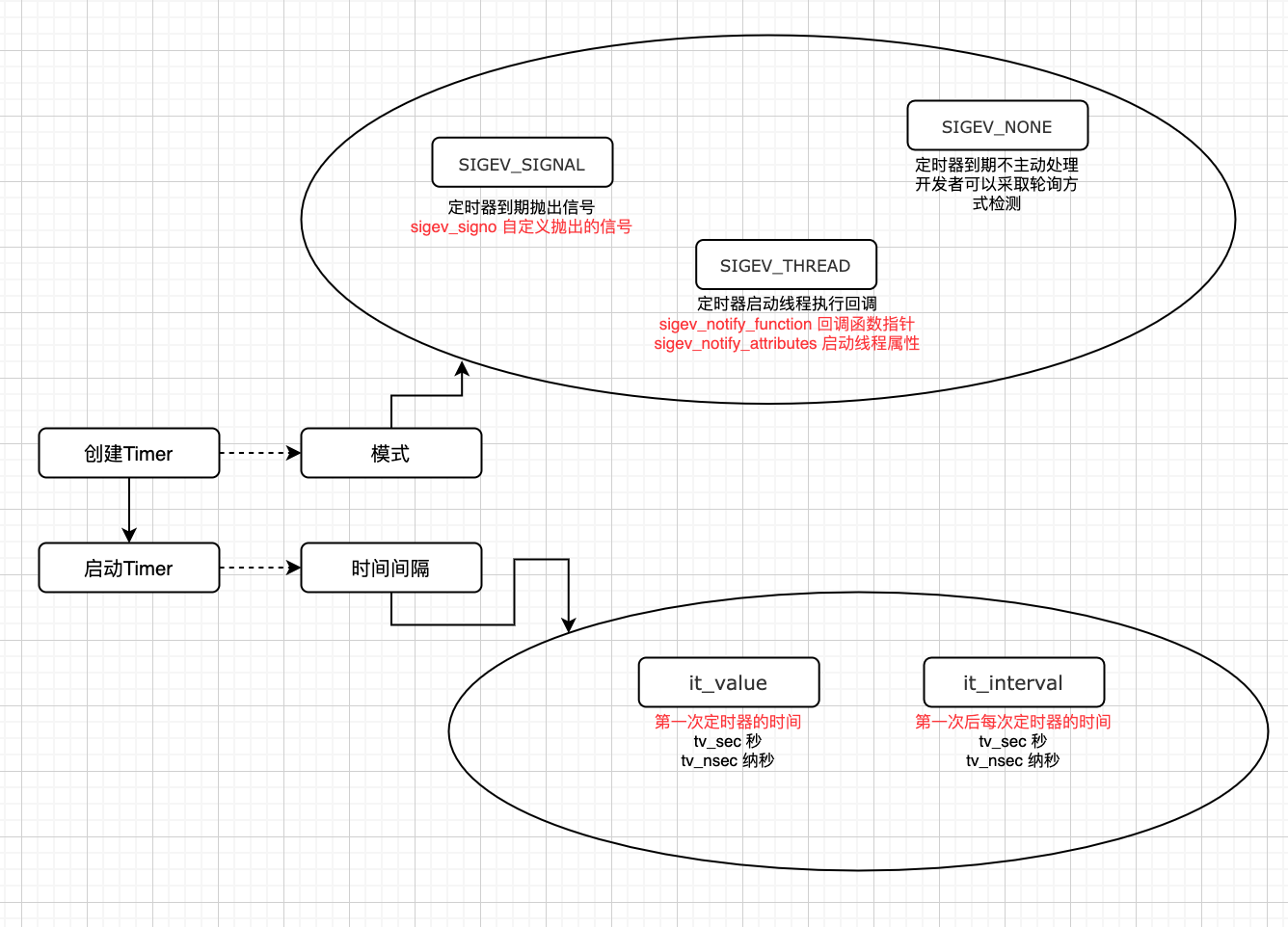
具体函数使用、结构等可以看官方文档,这里也给了一个简易封装的例子 posix 封装为 setTimeout。
BTW: 其实本质上 POSIX Timer 也是信号方案,可以观察进程信息中信号捕获。SIGEV_THREAD 模式下,会启动一个辅助线程,然后也是监听到 SIGTIMER 信号,再做后续处理,源码可见 https://code.woboq.org/userspace/glibc/sysdeps/unix/sysv/linux/timer_routines.c.html。
稍微总结一下,POSIX Timer 的方案,相比较之前已经完善了很多,不过还有一些缺点。
- 封装处理较为麻烦
- 必须依赖 librt
使用该方案的开源项目有 gperftools,核心的代码位置在 https://github.com/gperftools/gperftools/blob/master/src/profile-handler.cc#L282。
封装方式和上文中的例子差不多,只是模式不一样,这里就不详细讲解了。
多路复用
多路复用本身是为了解决服务器针对多连接时的阻塞问题,不过 select/poll/epoll 都提供了超时时间,而这一特性可以让我们使用到定时器中。
以 boost 的 timer 为例,看如下代码
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
#include <iostream> #include <boost/asio.hpp> int main(int argc, char* argv[]) { std::cout << "利利喝!" << std::endl; boost::asio::io_service io; boost::asio::deadline_timer timer(io, boost::posix_time::seconds(3)); timer.wait(); std::cout << "3s后利利喝不动了!" << std::endl; return 0; } |
代码很好理解,我们看一下 boost 是如何实现一个同步的 timer.wait 能力的,顺着 deadline_timer_service 可以找到最后源码位置在 https://github.com/boostorg/asio/blob/develop/include/boost/asio/detail/impl/socket_ops.ipp#L2162,简单到无需多余讲解。
BTW: 并且这里只用超时能力,不用担心 select 本身在多路复用中的性能问题。
boost 中的异步定时器,也是采用了多路复用的方案,使用的是 epoll,其中用到了 timer_fd,先简单的说一下 timer_fd。
timer_fd 是 linux2.6.25 后增加的 api,算是官方形式将定时能力和 IO 事件结合了起来。
异步定时器相比较同步复杂很多,所以我们通过分析 boost 中异步定时器的源码来详细展开下。
先画个图:
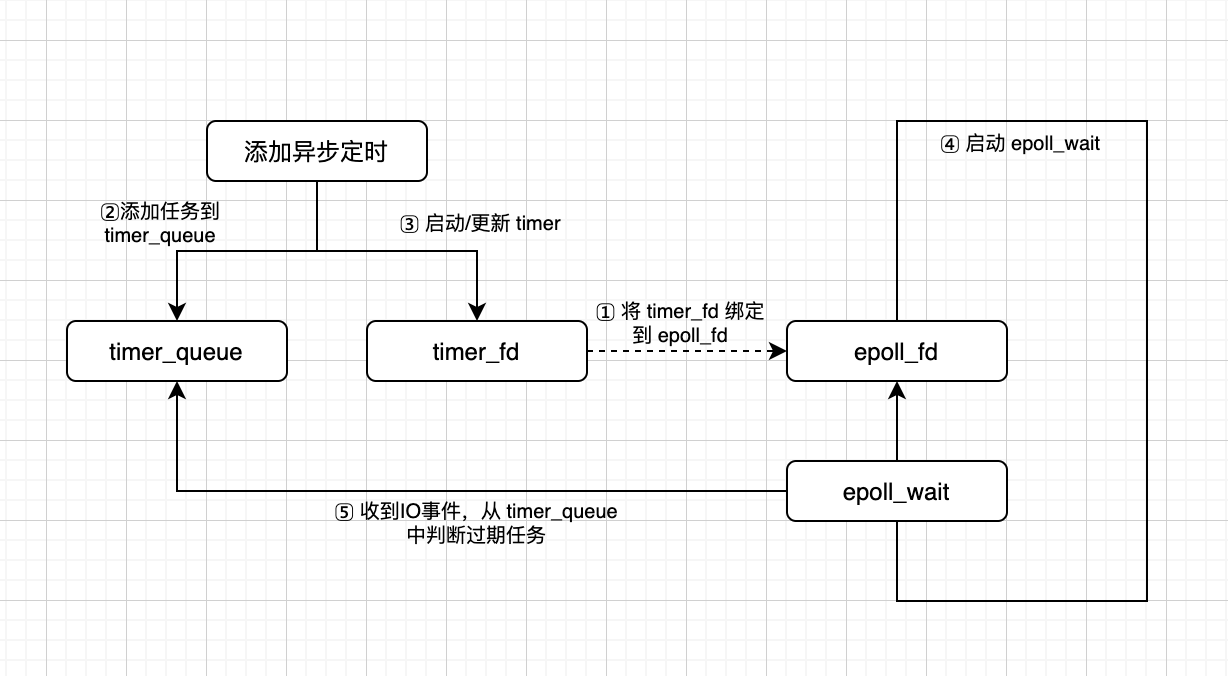
然后我们依次看一下。
-
将 timer_fd 绑定到 epoll_fd 上
epoll 使用一个文件描述符 (epoll_fd) 管理多个描述符 (例如这里的 timer_fd),这样在用户空间和内核空间的 copy 只需一次。
切记:这里 timer_fd 也需要进行复用,如果每次一个定时任务,都用一个新的 timer_fd,会有严重的性能浪费。123456789101112131415161718192021222324252627// epoll_reactor.ippepoll_reactor::epoll_reactor(boost::asio::execution_context& ctx): execution_context_service_base<epoll_reactor>(ctx),scheduler_(use_service<scheduler>(ctx)),mutex_(BOOST_ASIO_CONCURRENCY_HINT_IS_LOCKING(REACTOR_REGISTRATION, scheduler_.concurrency_hint())),interrupter_(),epoll_fd_(do_epoll_create()), // ❗创建了 epoll_fd(epoll_create)timer_fd_(do_timerfd_create()), // ❗创建了 timer_fdshutdown_(false),registered_descriptors_mutex_(mutex_.enabled()){// Add the interrupter's descriptor to epoll.epoll_event ev = { 0, { 0 } };ev.events = EPOLLIN | EPOLLERR | EPOLLET;ev.data.ptr = &interrupter_;epoll_ctl(epoll_fd_, EPOLL_CTL_ADD, interrupter_.read_descriptor(), &ev);interrupter_.interrupt();// Add the timer descriptor to epoll.if (timer_fd_ != -1){ev.events = EPOLLIN | EPOLLERR;ev.data.ptr = &timer_fd_;epoll_ctl(epoll_fd_, EPOLL_CTL_ADD, timer_fd_, &ev); // ❗关联 timer_fd 与 epoll_fd}}整体较好理解,几个重要的点增加了注释
-
添加任务到 timer_queue
1234567891011121314151617// timer_queue.hpp// Add a new timer to the queue. Returns true if this is the timer that is// earliest in the queue, in which case the reactor's event demultiplexing// function call may need to be interrupted and restarted.bool enqueue_timer(const time_type& time, per_timer_data& timer, wait_op* op){// Enqueue the timer object.// 略// Enqueue the individual timer operation.timer.op_queue_.push(op);// Interrupt reactor only if newly added timer is first to expire.return timer.heap_index_ == 0 && timer.op_queue_.front() == op;}// The heap of timers, with the earliest timer at the front.std::vector<heap_entry> heap_;enqueue_timer 里面大部分代码我省略掉了,也就是在维护一个小根堆,让最近的定时任务在前面,这样可以方便第三步启动和更新 timerfd。
BTW: 这里小根堆并不是像我们之前 demo 用了 priority_queue 方式,而是每次 push_back 会去 swap 修改 vector。 -
启动/更新 timerfd
结合上一节的代码,当 enqueue_timer 返回 true 的时候,就会去更新/启动定时器。123456789101112131415161718192021// epoll_reactor.hppbool earliest = queue.enqueue_timer(time, timer, op);// ...if (earliest)update_timeout(); // ❗更新定时器///////////////// epoll_reactor.ippvoid epoll_reactor::update_timeout(){#if defined(BOOST_ASIO_HAS_TIMERFD)if (timer_fd_ != -1){itimerspec new_timeout;itimerspec old_timeout;int flags = get_timeout(new_timeout);timerfd_settime(timer_fd_, flags, &new_timeout, &old_timeout); // ❗设置 timerfdreturn;}#endif // defined(BOOST_ASIO_HAS_TIMERFD)interrupt();}注意:如果不支持 timerfd,则会直接调用 epoll_ctl。
-
启动 epoll_wait
-
收到 IO 事件,从 timer_queue 中判断过期任务
这两步的代码位置太过相近,就放一起来说了。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 |
// epoll_reactor.hpp void epoll_reactor::run(long usec, op_queue<operation>& ops) { // This code relies on the fact that the scheduler queues the reactor task // behind all descriptor operations generated by this function. This means, // that by the time we reach this point, any previously returned descriptor // operations have already been dequeued. Therefore it is now safe for us to // reuse and return them for the scheduler to queue again. // Calculate timeout. Check the timer queues only if timerfd is not in use. int timeout; if (usec == 0) timeout = 0; else { timeout = (usec < 0) ? -1 : ((usec - 1) / 1000 + 1); if (timer_fd_ == -1) { mutex::scoped_lock lock(mutex_); timeout = get_timeout(timeout); } } // Block on the epoll descriptor. epoll_event events[128]; int num_events = epoll_wait(epoll_fd_, events, 128, timeout); // ❗核心 // ... #if defined(BOOST_ASIO_HAS_TIMERFD) bool check_timers = (timer_fd_ == -1); #else // defined(BOOST_ASIO_HAS_TIMERFD) bool check_timers = true; #endif // defined(BOOST_ASIO_HAS_TIMERFD) // Dispatch the waiting events. for (int i = 0; i < num_events; ++i) { void* ptr = events[i].data.ptr; if (ptr == &interrupter_) { // No need to reset the interrupter since we're leaving the descriptor // in a ready-to-read state and relying on edge-triggered notifications // to make it so that we only get woken up when the descriptor's epoll // registration is updated. #if defined(BOOST_ASIO_HAS_TIMERFD) if (timer_fd_ == -1) check_timers = true; #else // defined(BOOST_ASIO_HAS_TIMERFD) check_timers = true; #endif // defined(BOOST_ASIO_HAS_TIMERFD) } #if defined(BOOST_ASIO_HAS_TIMERFD) else if (ptr == &timer_fd_) { check_timers = true; } #endif // defined(BOOST_ASIO_HAS_TIMERFD) else { // The descriptor operation doesn't count as work in and of itself, so we // don't call work_started() here. This still allows the scheduler to // stop if the only remaining operations are descriptor operations. descriptor_state* descriptor_data = static_cast<descriptor_state*>(ptr); if (!ops.is_enqueued(descriptor_data)) { descriptor_data->set_ready_events(events[i].events); ops.push(descriptor_data); } else { descriptor_data->add_ready_events(events[i].events); } } } if (check_timers) // ❗check_timers 为 true 意味着需要检测定时器队列 { mutex::scoped_lock common_lock(mutex_); timer_queues_.get_ready_timers(ops); // ❗获取已经完成状态的事件并执行 #if defined(BOOST_ASIO_HAS_TIMERFD) if (timer_fd_ != -1) { itimerspec new_timeout; itimerspec old_timeout; int flags = get_timeout(new_timeout); timerfd_settime(timer_fd_, flags, &new_timeout, &old_timeout); // ❗继续设置定时器 } #endif // defined(BOOST_ASIO_HAS_TIMERFD) } } |
重点的就是有❗标志的代码。
timer_queues 里面发现的过期事件会添加到 op_queue 里面去,如下:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 |
// timer_queue.hpp virtual void get_ready_timers(op_queue<operation>& ops) { if (!heap_.empty()) { const time_type now = Time_Traits::now(); while (!heap_.empty() && !Time_Traits::less_than(now, heap_[0].time_)) { per_timer_data* timer = heap_[0].timer_; ops.push(timer->op_queue_); remove_timer(*timer); } } } |
op_queue 会在 scheduler.ipp 内进行执行。
以上就是 boost 中的异步定时器执行分解,感兴趣的同学也可以自己下源码来学习。
BTW: libevent 中定时任务做法与 boost 基本一致,chromium 底层的 message_pump 也有使用 libevent。
总结
我们了解到需要实现一个定时器/定时任务,重点需要两块:
- 存放执行回调的地方
大部分选择是小根堆的方案,简单方便;也有时间轮的方案。 - 调用操作系统提供的定时能力
我们分析了「信号」「POSIX Timer」「多路复用」,信号 pass,后二者中更推荐多路复用一些。
分析了 boost asio 的源码,学习了多路复用能力用在定时方面的解决办法。
如果你还想了解的更多,可以学习 libevent、libco、chromium 中定时器方面采取的方案。
欢迎一起讨论研究~
